


История создания колесо илона mecanum
Колесо илона mecanum – штука, которая порой вызывает больше вопросов, чем ответов. В интернете можно найти множество упрощенных объяснений, часто совершенно не отражающих всей сложности процесса проектирования и производства. Многие считают это просто 'колесом, которое может двигаться в любом направлении', но реальность, как всегда, оказывается гораздо интереснее. Хочу поделиться некоторыми мыслями и опытом, накопленным за время работы с этими механизмами. Причем, это не просто теоретические рассуждения, а попытка систематизировать наблюдения и извлеченные уроки, включая и те, что закончились, скажем так, менее удачно. В общем, давайте разбираться, как это все начиналось и куда движется.
Первые шаги и осознание необходимости
Началось все с простых задач – разработка мобильных роботов для складской логистики. Поиски оптимального решения для перемещения оказался неожиданно сложным. Традиционные колесные системы не давали достаточной маневренности в ограниченном пространстве. Классические телескопические колеса, хоть и решали часть проблемы, были громоздки и требовали сложного управления. И вот тогда мы серьезно заинтересовались колесом илона mecanum. Сразу было понятно: это решение, которое открывает новые возможности для робототехники. Но как это все работает? И какие нюансы нужно учитывать при проектировании?
Первая задача – понимание принципа работы. Недостаточно просто увидеть видео, где робот ловко разворачивается на месте. Нужно разобраться, как распределены усилия, как взаимодействуют двигатели и как обеспечивается стабильность. Попытки собрать прототип на основе 'самодельных' чертежей и информации из онлайн-источников, как это часто бывает, привели к… неоднозначным результатам. Пришлось потратить немало времени на отладку и перепроектирование, чтобы добиться хоть какого-то работоспособного устройства.
Проблемы с точностью и стабильностью
Одним из первых серьезных вызовов стало обеспечение точности перемещения. Колеса илона mecanum позволяют двигаться в любом направлении, но это же означает, что контроль над положением становится гораздо сложнее. Небольшая погрешность в работе одного из двигателей может привести к деформации траектории движения, особенно при выполнении сложных маневров. Это особенно актуально для роботов, которые должны точно позиционировать объекты.
Мы столкнулись с проблемой люфта в механизме. Несмотря на использование высокоточных подшипников, люфт всё равно присутствовал и влиял на точность. Пришлось экспериментировать с различными конструктивными решениями, чтобы минимизировать его влияние. Один из вариантов – использование жестких соединений и специальных фиксаторов, но это увеличивало вес и сложность конструкции. В итоге нашли компромиссное решение, сочетающее в себе жесткость и легкость.
Подбор двигателей и системы управления
Выбор двигателей – это отдельная песня. Слишком слабые двигатели не обеспечат достаточной мощности, а слишком мощные – приведут к перегреву и преждевременному износу. Мы тестировали различные модели, уделяя особое внимание КПД и крутящему моменту. Оптимальным оказался выбор серводвигателей с регулируемым крутящим моментом, что позволило точно контролировать скорость и положение колес. Важным аспектом стало создание эффективной системы управления. Простое управление скоростью каждого двигателя не давало желаемого результата. Пришлось разработать сложный алгоритм, учитывающий угол поворота каждого колеса и обеспечивающий плавное и стабильное движение.
Для управления колесами илона mecanum, как правило, используют специализированные контроллеры с поддержкой PID-регулирования. Это позволяет точно поддерживать заданную скорость и положение колес, а также компенсировать внешние возмущения. Однако, даже с использованием PID-регулирования, необходимо учитывать нелинейные характеристики системы и вносить корректировки в алгоритм управления.
Материалы и производство
Выбор материалов также имеет большое значение. Необходимо учитывать прочность, вес и стоимость. Мы использовали алюминиевые сплавы для изготовления корпуса и колес, а также стальные подшипники. Важным аспектом является точность обработки деталей. Небольшие отклонения от размеров могут привести к проблемам с сборкой и работоспособностью механизма. В нашей компании, ОООШэньян Синьян Полиуретановые технологии, у нас есть собственный производственный цех, где мы можем изготавливать детали с высокой точностью. Наш завод занимает площадь 6000 квадратных метров, а производственный цех – 4500 квадратных метров. Здесь работает около 85 сотрудников, включая технических и управленческих специалистов.
Иногда, для прототипов, используют 3D-печать, но она, конечно, не подходит для серийного производства. Важно учитывать тепловыделение при работе колес и предусматривать систему охлаждения, особенно при высоких нагрузках. В противном случае, двигатели могут перегреться и выйти из строя. Мы экспериментировали с различными системами охлаждения – от воздушных радиаторов до жидкостных охладителей. В конечном итоге, нашли оптимальное решение – использование радиаторов с вентиляторами, обеспечивающих эффективный отвод тепла.
Ошибки и извлеченные уроки
Конечно, в процессе работы с колесами илона mecanum мы совершили немало ошибок. Одна из них – недооценка важности точности сборки. Небольшие погрешности в установке деталей могут привести к серьезным проблемам с работоспособностью механизма. Другая ошибка – использование некачественных материалов. Дешевые детали быстро выходят из строя и требуют замены. Еще одна ошибка – игнорирование необходимости тестирования системы в реальных условиях. Тестирование на стенде не позволяет выявить все возможные проблемы, которые могут возникнуть при эксплуатации.
Самый яркий пример – попытка использовать колеса илона mecanum для создания мобильной платформы, способной преодолевать сложные препятствия. Мы рассчитали все параметры, создали прототип и… он просто не заработал. Оказалось, что недостаточно простой системы управления и необходимого крутящего момента. Этот опыт научил нас тому, что нельзя полагаться только на расчеты и теоретические модели. Необходимо учитывать все факторы и проводить тщательное тестирование.
Заключение
Колесо илона mecanum – это действительно интересное и перспективное решение для робототехники. Но оно требует серьезного подхода к проектированию и производству. Необходимо учитывать множество факторов – от точности сборки до выбора материалов и системы управления. И, конечно, не стоит бояться экспериментировать и учиться на своих ошибках. В ОООШэньян Синьян Полиуретановые технологии мы постоянно совершенствуем свои технологии и разрабатываем новые решения для наших клиентов. Надеюсь, мои размышления были полезны и, возможно, помогут кому-то избежать ошибок при работе с этим удивительным механизмом.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 Полиуретановый износостойкий вкладыш
Полиуретановый износостойкий вкладыш -
 Сальник
Сальник -
 Кольцевые уплотнения
Кольцевые уплотнения -
 Смесительный бак с полиуретановой футеровкой
Смесительный бак с полиуретановой футеровкой -
 U-образное уплотнение
U-образное уплотнение -
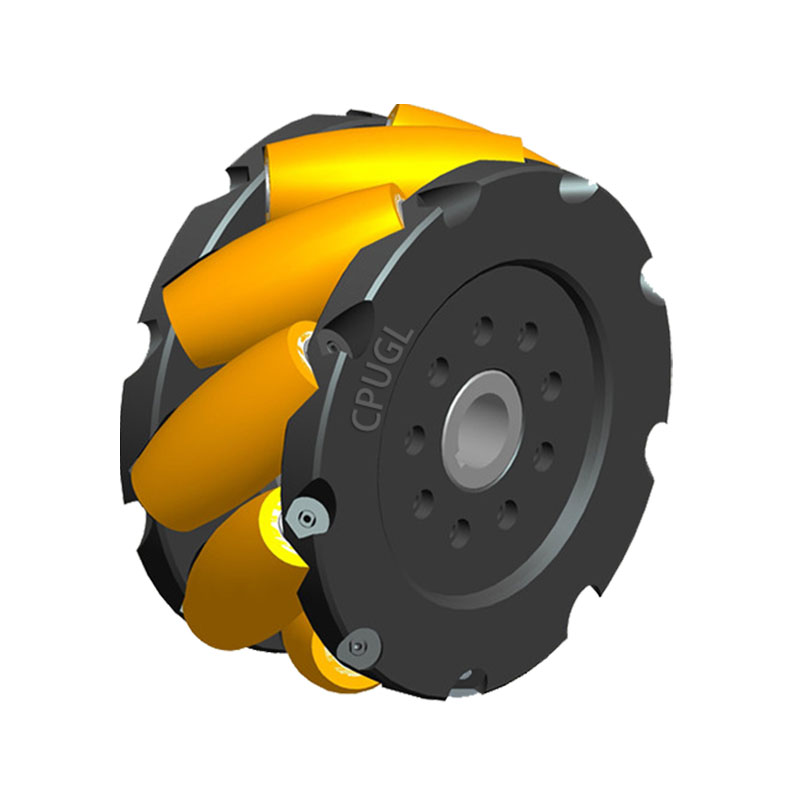 Меканум колеса
Меканум колеса -
 Колеса для аттракционов и фитнес-оборудования
Колеса для аттракционов и фитнес-оборудования -
 Полиуретановый барьер от столкновений
Полиуретановый барьер от столкновений -
 Полиуретановые печатные валы
Полиуретановые печатные валы -
 Полиуретановые скребки для конвейерных лент
Полиуретановые скребки для конвейерных лент -
 Y-образное уплотнение
Y-образное уплотнение -
 Полиуретановые резьбовые ролики
Полиуретановые резьбовые ролики
Связанный поиск
Связанный поиск- колесо большегрузное полиуретановое неповоротное поставщик
- Производители полиуретановых колес из Китая
- Полиуретановые буферные пружины: преимущества и применение
- шкив ведомый для мотоблока
- Основные страны-покупатели полиуретанового колеса 150 мм из Китая
- Тяжелые полиуретановые колеса ролики цены в Китае
- Цены на круглые уплотнительные прокладки в Китае
- кольца уплотнительные 9833
- Полиуретановый противоударный блок завод
- Лучшие страны-покупатели круглых резиновых уплотнений в Китае